數(shù)據(jù)驅(qū)動(dòng)的智駕十年 特斯拉、Momenta合流闖進(jìn)Robotaxi衛(wèi)冕之戰(zhàn)汽車
特斯拉這場(chǎng)智駕的“西進(jìn)運(yùn)動(dòng)”是如何推進(jìn)的?
文 | 智能相對(duì)論
作者 | 海怪
2025年4月,工信部的一紙公告,讓炙熱的智駕行業(yè)開始了一場(chǎng)“集體正名”運(yùn)動(dòng)。
一夜之間,原本行業(yè)常用的“高階智駕”、“智能駕駛”、“零接管"等行業(yè)熱詞打回到本來面目:組合駕駛輔助或輔助駕駛。
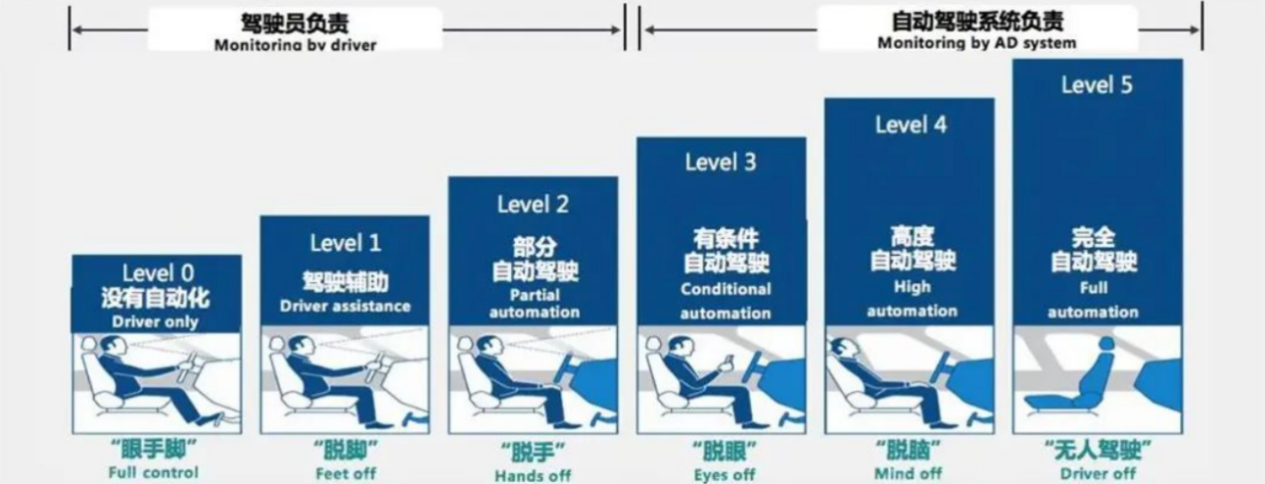
(國(guó)際汽車工程師學(xué)會(huì)的自動(dòng)駕駛分級(jí))
過去的十年,智駕行業(yè)狂飆突進(jìn),理性與夢(mèng)想齊飛,野心與煎熬并存。當(dāng)下,在2025智駕淘汰賽和強(qiáng)力監(jiān)管之下,所有智駕玩家,概念拉齊,剩下只看實(shí)力——裸泳者出局,喧囂者閉嘴,長(zhǎng)跑者勝出。
引發(fā)智駕行業(yè)這場(chǎng)“正名”的“始作俑者”,正是今年剛剛將FSD功能引入中國(guó)市場(chǎng)的特斯拉。2013年,特斯拉在與谷歌無人車的一場(chǎng)早期合作中,馬斯克提出了Autopilot的構(gòu)想,即將一個(gè)用于航空業(yè)的“自動(dòng)駕駛儀”的概念應(yīng)用到全新的自動(dòng)駕駛領(lǐng)域。
Autopilot對(duì)行業(yè)影響深遠(yuǎn)。至今我們?cè)谲嚻笮麄髦锌吹降腘OA(領(lǐng)航輔助駕駛),其中A就是Autopilot的簡(jiǎn)寫。所以,Autopilot概念有著很強(qiáng)的前瞻性,能夠很好描述這種機(jī)器自主操控同時(shí)人類隨時(shí)監(jiān)管的狀態(tài)。但它字面意義上又極具迷惑性,使得普通人很容易將其當(dāng)做完全自動(dòng)駕駛來使用,以至于此后引發(fā)了多起事故悲劇。
谷歌和特斯拉短暫合作過后,雙方很快分道揚(yáng)鑣。谷歌開始專注完全無人的L4自動(dòng)駕駛,瞄準(zhǔn)Robotaxi市場(chǎng),而特斯拉則面向乘用車市場(chǎng),提供面向駕駛員的L2駕駛輔助。
特斯拉的邏輯是,通過量產(chǎn)輔助駕駛的數(shù)據(jù)推動(dòng)軟件算法的迭代升級(jí),以遠(yuǎn)比L4更低的成本來逐步實(shí)現(xiàn)自動(dòng)駕駛。而前谷歌自動(dòng)駕駛技術(shù)負(fù)責(zé)人Chris Urmson后面則暗諷:輔助駕駛想要實(shí)現(xiàn)無人駕駛,就跟一個(gè)不斷練習(xí)跳高的人終有一天可以飛起來一樣(不可能)。
2016年,特斯拉發(fā)布了FSD智駕套件,F(xiàn)SD字面意思為完全自動(dòng)駕駛。這是一個(gè)更具迷惑性的名字。但其實(shí),F(xiàn)SD一直以來都只是其智駕硬件的代名詞。直到今天,特斯拉FSD的實(shí)質(zhì)仍然是L2輔助駕駛級(jí)別,仍然強(qiáng)調(diào)其Supervised(人駕監(jiān)督)的性質(zhì)。所以,今年3月底,積極推動(dòng)FSD入華的特斯拉便十分乖巧的將國(guó)內(nèi)官網(wǎng)的FSD駕駛套件更名為“智能輔助駕駛功能”。
然而,時(shí)至今日。一個(gè)全新的契機(jī)也正悄然來臨。原本被Waymo(谷歌無人車業(yè)務(wù)2016年獨(dú)立而來)所看不上的輔助駕駛路線,正在悄然向L4自動(dòng)駕駛發(fā)起沖鋒。
據(jù)報(bào)道,特斯拉重新提交“Tesla Robotaxi”商標(biāo)申請(qǐng),并計(jì)劃于6月中下旬在得克薩斯州奧斯汀啟動(dòng)Robotaxi測(cè)試。雖然初步可能只有10臺(tái)左右的投放,但終于要把馬斯克多次跳票但一直堅(jiān)持的大餅給圓上了。
而我們也看到,中國(guó)的Robotaxi玩家們也加速了規(guī)模化推廣和全球化商業(yè)運(yùn)營(yíng)的節(jié)奏。不止是追隨Waymo的小馬智行、文遠(yuǎn)知行等玩家,作為量產(chǎn)輔助駕駛頭部玩家的Momenta也宣布要推出基于現(xiàn)有方案的前裝量產(chǎn)的Robotaxi,也將一舉從輔助駕駛方案抵達(dá)Robotaxi的市場(chǎng)。
以數(shù)據(jù)驅(qū)動(dòng)推動(dòng)AI算法進(jìn)化,通過量產(chǎn)輔助駕駛和L4自動(dòng)駕駛兩大支點(diǎn)的協(xié)同進(jìn)化,讓“輔助駕駛”和“自動(dòng)駕駛”的技術(shù)邊界線完全被打破。
為什么是數(shù)據(jù)驅(qū)動(dòng)的特斯拉和Momenta,不約而同地完成這條“從跳躍到飛躍”的技術(shù)躍遷?我們還得從過去十年間說起,一起搞清楚這場(chǎng)蛻變背后的草蛇灰線。
激進(jìn)拓荒者:特斯拉押注AI智駕路
19世紀(jì)初,大批美國(guó)的早期創(chuàng)業(yè)者們闖入西部,開疆?dāng)U土,開啟了持續(xù)半個(gè)世紀(jì)的西進(jìn)運(yùn)動(dòng)。
而馬斯克就像當(dāng)時(shí)那些心懷理想和發(fā)財(cái)夢(mèng)的牛仔,帶著特斯拉開啟了乘用車智能輔助駕駛的狂飆突進(jìn)。
特斯拉這場(chǎng)智駕的“西進(jìn)運(yùn)動(dòng)”是如何推進(jìn)的?
從2014年至今大致可以分為三個(gè)階段,分別是:2014-2016年的外部合作期,2016年到2019年的自研過渡期,以及2019年至今的全面自研期。
第一階段,特斯拉先后與Mobileye和英偉達(dá)建立過合作,經(jīng)歷了“軟硬件外采”、“硬件外采、軟件自研”的艱難歷程。
2014年,特斯拉在“Autopilot”上并無多少積累,本著“能上車就算贏”的策略,選擇了當(dāng)時(shí)市面上能達(dá)到L2輔助駕駛能力的視覺方案——Mobileye的EyeQ3,AI算力是今天看起來少得可憐的0.25 TOPS,只能支持一個(gè)前視攝像頭、一個(gè)毫米波雷達(dá)和12個(gè)超聲波雷達(dá),從而實(shí)現(xiàn)了自適應(yīng)巡航、前車碰撞預(yù)警以及方向盤自主變道等功能。
基于這一軟硬件外采方案,特斯拉于2014年10月發(fā)布Autopilot1.0版本和硬件模塊Hardware1.0。但實(shí)際上直到1年后的2015年10月,特斯拉車主采真正使用上。

馬斯克從一開始就對(duì)Mobileye的黑盒交付(就是軟硬件封裝起來,不會(huì)對(duì)主機(jī)廠開放)十分不滿。借著2016年那場(chǎng)人類世界首例“自動(dòng)駕駛車事故”的由頭,特斯拉果斷拋棄Mobileye,轉(zhuǎn)向了英偉達(dá)的懷抱。
2016年10月,特斯拉發(fā)布了Autopilot 2.0和硬件模塊HW 2.0。計(jì)算單元是英偉達(dá)DRIVE PX2定制主板,主板上面搭載了Tegra X2 CPU和升級(jí)為Pascal架構(gòu)的GPU,算力是10 TOPS,幾乎是Mobileye EyeQ3的整整40倍。外接傳感器包含了8個(gè)攝像頭、1個(gè)毫米波雷達(dá)、12個(gè)超聲波雷達(dá)。
但英偉達(dá)和特斯拉在軟件算法上也并沒有特別突出,一直到第二年的上半年,才將Autopilot 1.0的主要功能實(shí)現(xiàn)出來。
英偉達(dá)不過也是“過墻梯”,馬斯克通過NVIDIA Drive這樣一個(gè)自由度很高的開放平臺(tái),鍛煉了軟件算法,為自研打下了基礎(chǔ)。
第二階段,特斯拉在和英偉達(dá)你儂我儂之際,就開始了智駕芯片的自研之路。這就是后面被公眾所熟知的FSD芯片,單片AI算力72TOPS,采用高度定制的CPU+GPU+ASIC架構(gòu),其中ASIC是由兩個(gè)神經(jīng)網(wǎng)絡(luò)處理單元NPU組成,專門用作視覺圖形處理。

2019年,特斯拉推出FSD軟件系統(tǒng)和HW3.0。相比較前一代HW 2.5(算力20TOPS),HW3.0平臺(tái)上配備了兩顆FSD芯片達(dá)到144TOPS,系統(tǒng)算力增長(zhǎng)了7倍多。
也是在這一階段,除了芯片自研之外,特斯拉招募了大批人工智能算法專家,開始感知和決策當(dāng)中引入深度學(xué)習(xí)算法。為適應(yīng)AI算法所需要的大規(guī)模數(shù)據(jù)處理和標(biāo)注,特斯拉還引入了上千人的標(biāo)注團(tuán)隊(duì)以及不斷擴(kuò)容的數(shù)據(jù)中心。
以至于在2019年4月的Autonomy Day上,馬斯克首次公布了超級(jí)計(jì)算機(jī)Dojo的研發(fā)計(jì)劃。
至此,特斯拉進(jìn)入第三階段——全面自研階段。
作為量產(chǎn)的智能駕駛方案,在特斯拉這里,形成一個(gè)基于AI三要素——即算法、數(shù)據(jù)和算力,所形成的數(shù)據(jù)驅(qū)動(dòng)的開發(fā)范式。
數(shù)據(jù),自不必說,來自量產(chǎn)車型和采集車回傳的大量駕駛場(chǎng)景數(shù)據(jù)和駕駛行為數(shù)據(jù),由于當(dāng)時(shí)的算法采用監(jiān)督學(xué)習(xí),十分依賴高質(zhì)量的標(biāo)注數(shù)據(jù),所以數(shù)據(jù)標(biāo)注一直是一個(gè)“人工大于智能”的苦活累活。同時(shí)也包括大量仿真構(gòu)造的虛擬場(chǎng)景數(shù)據(jù),用于真實(shí)世界里很難遇到的corner cases(極端場(chǎng)景)或長(zhǎng)尾場(chǎng)景。
算力,即剛剛一直講到的車端的計(jì)算單元,主要是指運(yùn)行智駕算法AI芯片。同時(shí)也包括在云端進(jìn)行算法訓(xùn)練和數(shù)據(jù)處理的AI芯片,市面上主要是被英偉達(dá)的GPU所壟斷,而特斯拉的Dojo則更進(jìn)一步為自動(dòng)駕駛視覺模型訓(xùn)練設(shè)計(jì),
算法,籠統(tǒng)來講,就是由云端計(jì)算平臺(tái)根據(jù)大規(guī)模數(shù)據(jù)學(xué)習(xí)所訓(xùn)練出來的一堆神經(jīng)網(wǎng)絡(luò),然后經(jīng)過微調(diào)、蒸餾等方式部署到車端,形成一個(gè)可以處理感知理解、認(rèn)知決策和預(yù)測(cè)規(guī)劃等任務(wù)的復(fù)雜神經(jīng)網(wǎng)絡(luò)系統(tǒng)。
這里為什么可以將特斯拉比喻為“西部拓荒者”,原因無他,就是特斯拉以引路人的角色徹底塑造了如今主流的自動(dòng)駕駛技術(shù)路線。
2021年的Tesla AI Day具有里程碑意義,約等于公開了特斯拉在之前數(shù)年時(shí)間的技術(shù)探索。我們以智駕系統(tǒng)最重要的感知算法為例,再花一些篇幅來梳理特斯拉智駕算法的迭代過程。
感知的核心任務(wù)是識(shí)別和理解外部環(huán)境。特斯拉的8個(gè)攝像頭可以不停地采集到外部世界的2D圖像,也就是平面圖像,但這不足以構(gòu)造出我們?nèi)祟愸{駛所需要的始終延續(xù)的車道線、疾馳而過的車輛等信息。通過感知神經(jīng)網(wǎng)路,特斯拉構(gòu)建出一個(gè)表征真實(shí)世界的3D向量空間。
2021年 AI Day上,特斯拉公布的感知方案,就是基于3D向量空間構(gòu)造出一個(gè)HydraNet架構(gòu),即多個(gè)任務(wù)頭(head,像九頭蛇一樣)共享一個(gè)數(shù)據(jù)“軀干”(BackBone),利用多頭執(zhí)行包括物體檢測(cè)、交通燈識(shí)別、車道線預(yù)測(cè)等任務(wù)。

這就是外界所津津樂道的“BEV+Transformer”,其中BEV就是這8個(gè)攝像頭拼接而成的一個(gè)360度俯視場(chǎng)景圖,真實(shí)還原周圍的環(huán)境,前后相繼延長(zhǎng)的車道線、出現(xiàn)在不同攝像頭里的車輛,符合我們?nèi)祟愐曈X習(xí)慣,甚至超越人類視覺范圍。
而Transformer是2017年谷歌推出的一種神經(jīng)網(wǎng)絡(luò)架構(gòu),開啟了我們今天所熟知的大模型時(shí)代,最初被應(yīng)用在自然語(yǔ)言任務(wù)處理當(dāng)中,而谷歌研究者在2020年發(fā)現(xiàn),Transformer在處理圖像任務(wù)時(shí)也十分高效,由此推出了Vision Transformer(ViT),突破了原有的卷積神經(jīng)網(wǎng)絡(luò)(CNN)的局限,一舉成為智駕主流的感知算法架構(gòu)。
到了2022年的AI Day上面,特斯拉在感知模塊進(jìn)一步升級(jí)了占用網(wǎng)絡(luò)(Occupancy Network),配合 NERF 算法,可以在 BEV+Transformer 感知框架的基礎(chǔ)上實(shí)現(xiàn)通用能力更強(qiáng)的 3D 空間感知。形象理解,就是將感知環(huán)境當(dāng)中的元素給體素化,變成帶有時(shí)空信息的信息,能夠讓車輛更好預(yù)測(cè)障礙物的軌跡,也可以更好規(guī)劃自車的軌跡。
這兩屆AI Day帶給整個(gè)行業(yè)極大的啟發(fā),大量從業(yè)者對(duì)特斯拉公布多方案進(jìn)行像素級(jí)的研究。特斯拉擔(dān)心自己暴露了過多信息,所以2022 AI Day之后,至今再無下一屆。
就當(dāng)中國(guó)的信徒們亦步亦趨跟隨特斯拉的技術(shù)方案之時(shí),特斯拉又放出了“端到端”的全新方案。
在此之前,在特斯拉智駕軟件算法中,感知、規(guī)劃、控制等模塊一直是相對(duì)獨(dú)立,其中感知算法是神經(jīng)網(wǎng)絡(luò)化最為徹底的,而規(guī)控算法則帶有大量的人工規(guī)則代碼。而特斯拉在“端到端”方案之前,已經(jīng)嘗試將神經(jīng)網(wǎng)絡(luò)用于自車軌跡預(yù)測(cè)、規(guī)劃當(dāng)中。
而端到端,就是這一進(jìn)程的最極致表現(xiàn),完全采用一張神經(jīng)網(wǎng)絡(luò),將感知、軌控和執(zhí)行鏈接起來,“圖像進(jìn)、動(dòng)作出”,像極了我們?nèi)祟惱纤緳C(jī)開車的過程,我們做出加減速、轉(zhuǎn)向燈動(dòng)作幾乎是跟感知同時(shí)且不加思索的。而之前的所謂模塊化,則像極了新手司機(jī)先要判斷下看到了什么、思考下這個(gè)情況應(yīng)該怎么辦,然后再告訴手和腳要怎么行動(dòng)。
端到端方案和模塊化方案的高下立分,但實(shí)現(xiàn)端到端并不容易。
2023年,特斯拉開始嘗試端到端方案的測(cè)試,系統(tǒng)運(yùn)行速度比原方案更快,甚至直接刪掉了用于確保安全、文明駕駛的30萬行人工代碼,輔之以端到端系統(tǒng)自己學(xué)到的人類的開車知識(shí)。
2024年,特斯拉FSD V12版本正式發(fā)布,采用端到端架構(gòu),表現(xiàn)優(yōu)異,再次引領(lǐng)了潮水的走向。
這幾乎是一次革命性的技術(shù)躍升,但特斯拉并沒有透露細(xì)節(jié),但是特斯拉從開創(chuàng)的數(shù)據(jù)驅(qū)動(dòng)的技術(shù)范式,讓同行找到端到端的known-how已經(jīng)不再遙不可及。
來自大洋對(duì)岸的中國(guó)智駕創(chuàng)業(yè)公司,也找到了自己的破繭成長(zhǎng)之路。
熱血難涼:Momenta篤定“數(shù)據(jù)飛輪”
2016年是全球自動(dòng)駕駛產(chǎn)業(yè)第一個(gè)爆發(fā)節(jié)點(diǎn)。
這一年,谷歌無人車項(xiàng)目獨(dú)立,成為今天還活躍在 Robotaxi市場(chǎng)的Waymo,谷歌團(tuán)隊(duì)出走創(chuàng)辦的Cruise在這一年被通用高價(jià)收購(gòu)。
更多的自動(dòng)駕駛精英先后走出,成立了一家又一家自動(dòng)駕駛公司,進(jìn)入無人出行及物流領(lǐng)域。
國(guó)內(nèi)同樣繼百度之后,涌現(xiàn)出一批自動(dòng)駕駛公司,Momenta、小馬智行以及17年成立的文遠(yuǎn)知行,也都是作為Waymo的信徒,以實(shí)現(xiàn)L4自動(dòng)駕駛為目標(biāo)。
在接下來的幾年間,特斯拉從長(zhǎng)期在自動(dòng)駕駛領(lǐng)域墊底的小透明,成長(zhǎng)為行業(yè)不可忽視的新興力量——它將智能輔助駕駛這條路走通了。
即通過規(guī)模量產(chǎn)積累數(shù)據(jù),不斷優(yōu)化軟件算法,來實(shí)現(xiàn)智駕的迭代升級(jí),進(jìn)一步又促進(jìn)用戶的使用,形成數(shù)據(jù)驅(qū)動(dòng)的正向加速。
而Robotaxi的重傳感器、重高精地圖的模式,只能用小規(guī)模車隊(duì)在限定范圍做運(yùn)營(yíng)測(cè)試,從而陷入難以規(guī)模化增長(zhǎng)以實(shí)現(xiàn)正向商業(yè)閉環(huán)的陷阱。
這就是行業(yè)長(zhǎng)期以來的跨越式和漸進(jìn)式路線之爭(zhēng)。
谷歌向左,特斯拉向右,大多數(shù)跟隨者選擇了站隊(duì)Waymo,很長(zhǎng)時(shí)間Robotaxi甚囂塵上。
Momenta似乎選擇了第三條路,更傾向于特斯拉,先做量產(chǎn)智駕方案,但不放棄L4自動(dòng)駕駛。
Momenta CEO曹旭東,一個(gè)以《航海王》主人公路飛作為頭像的年輕人,以熱血少年的姿態(tài),毫不猶豫地邁進(jìn)自動(dòng)駕駛的“偉大航路”里,試圖用人工智能的方式來完成一個(gè)少有人敢走的路,實(shí)現(xiàn)L4自動(dòng)駕駛。
如今來看,Momenta仿佛是一開始就拿到偉大航路的地圖,踩對(duì)了幾乎所有節(jié)點(diǎn),才成就了如今頭部量產(chǎn)輔助駕駛的地位。
但實(shí)際上,過程并不會(huì)如此簡(jiǎn)單。
從2016到2018年最初成立的兩年,Momenta更像是一個(gè)技術(shù)研究院,專攻自動(dòng)駕駛的算法優(yōu)化,做課題、刷比賽,以學(xué)霸的方式來吸引投資人的關(guān)注。
數(shù)據(jù)驅(qū)動(dòng)算法、量產(chǎn)輔助駕駛和全無人駕駛并行的想法,在Momenta成立之初就有。2018年,Momenta越來越意識(shí)到量產(chǎn)經(jīng)驗(yàn)和數(shù)據(jù)規(guī)模的重要性,后來將戰(zhàn)略總結(jié)成 “一個(gè)飛輪,兩條腿”。

所謂“一個(gè)飛輪”,就是打造“數(shù)據(jù)飛輪”這一高效開發(fā)模式,所謂“兩條腿”,就是智能輔助駕駛與自動(dòng)駕駛Robotaxi兩個(gè)業(yè)務(wù)線相輔相成,用量產(chǎn)輔助駕駛產(chǎn)生海量數(shù)據(jù)以訓(xùn)練自動(dòng)駕駛算法,解決L4完全無人駕駛的長(zhǎng)尾問題。同時(shí)再用L4的技術(shù)賦能L2量產(chǎn)輔助駕駛產(chǎn)品力 的提升,形成技術(shù)迭代與數(shù)據(jù)收集的良性循環(huán)。
2019年,Momenta發(fā)布了可量產(chǎn)的結(jié)構(gòu)化道路自動(dòng)駕駛解決方案Mpilot和完全無人駕駛方案MSD。Mpilot即L2智能輔助駕駛,側(cè)重于量產(chǎn)自動(dòng)駕駛技術(shù)的快速演進(jìn)。
2021年,Momenta憑借兩年前和上汽合作預(yù)研的記憶泊車項(xiàng)目的契機(jī),Momenta不僅獲得了上汽的大筆融資,也拿到了最為關(guān)鍵的首個(gè)量產(chǎn)乘用車輔助駕駛車型——智己。
當(dāng)時(shí)在市面上,Momenta的自動(dòng)駕駛產(chǎn)品狀態(tài)最接近量產(chǎn)狀態(tài),也最接近特斯拉的水平。特斯拉推出了高速NOA方案,而Momenta將其作為對(duì)標(biāo)產(chǎn)品,要開始打造“中國(guó)的特斯拉NOA體驗(yàn)”。
在和智己打磨這套量產(chǎn)輔助駕駛方案中,Momenta真正練就了這個(gè)高速運(yùn)轉(zhuǎn)的數(shù)據(jù)飛輪,也鍛造了強(qiáng)大工程化能力。
對(duì)于L4自動(dòng)駕駛,Momenta不僅是和其他Robotaxi公司一樣推動(dòng)少量無人車的城區(qū)運(yùn)營(yíng)測(cè)試,而是更看重?cái)?shù)據(jù)驅(qū)動(dòng)范式下,通過量產(chǎn)乘用車的數(shù)據(jù)規(guī)模進(jìn)行AI算法的持續(xù)迭代,以及對(duì)于閉環(huán)自動(dòng)化流程不斷優(yōu)化打造。
無怪乎,Momenta成為中國(guó)最早一批將端到端方案落地的智駕公司。
這一切有跡可循。
據(jù)官方透露,Momenta在2019年就開始用Transformer來做預(yù)測(cè)、路徑規(guī)劃等。到2022年初,Momenta的AD2.0已經(jīng)在用AI模型做感知的多任務(wù)預(yù)測(cè),以及開始嘗試決策模塊的模型化。

2023年上半年發(fā)布AD3.0,其感知可以將時(shí)序任務(wù)整合到同一模型,規(guī)劃算法轉(zhuǎn)向數(shù)據(jù)驅(qū)動(dòng),開始面向成熟量產(chǎn)上車。
2023年下半年,AD4.0可以將感知所有任務(wù)整合到同一模型,規(guī)劃全部數(shù)據(jù)驅(qū)動(dòng)處理。這一階段的智駕方案,實(shí)質(zhì)上就相當(dāng)于兩段式端到端。
只不過當(dāng)時(shí),端到端這個(gè)名詞,特斯拉還沒有喊出來,整個(gè)行業(yè)對(duì)這一詞匯都稍顯陌生。
2024年3月底,特斯拉正式推出FSD V12端到端方案,然而不到半年,Momenta 也正式發(fā)布了AD5.0一段式端到端方案,將感知與規(guī)劃整合進(jìn)一個(gè)大模型。
這一發(fā)難是按照人腦的長(zhǎng)短期記憶結(jié)構(gòu)構(gòu)造的智駕大模型,按照類人直覺和體系,進(jìn)行快速迭代。
短期記憶用來學(xué)習(xí)新的數(shù)據(jù)信息,等到數(shù)據(jù)和方法被驗(yàn)證后,就會(huì)進(jìn)入長(zhǎng)期記憶去學(xué)習(xí),最終成為端到端大模型的知識(shí)。

這一切仍然還是圍繞數(shù)據(jù)飛輪大模型進(jìn)行運(yùn)轉(zhuǎn),短期記憶圍繞數(shù)據(jù)采集(比如車輛篩選、長(zhǎng)尾覆蓋),以天級(jí)為迭代周期;而長(zhǎng)期記憶,圍繞數(shù)據(jù)回流、數(shù)據(jù)分析、數(shù)據(jù)標(biāo)注、模型訓(xùn)練、測(cè)試驗(yàn)證等環(huán)節(jié),以周級(jí)為迭代周期。
現(xiàn)在,Momenta 這個(gè)一段式端到端智駕大模型,已經(jīng)廣泛搭載到上汽智己、比亞迪騰勢(shì)、廣汽豐田、昊鉑、埃安等車型上面,實(shí)現(xiàn)了從感知到規(guī)劃再到控制的全過程模型化整合,用“無圖+端到端”的方式,來實(shí)現(xiàn)高速、城市領(lǐng)航輔助、泊車輔助等全場(chǎng)景無圖智駕功能。
找到OnePiece:開啟Robotaxi的衛(wèi)冕之戰(zhàn)
此時(shí),本文的兩大主角都來到了故事的中局——從量產(chǎn)輔助駕駛走向L4自動(dòng)駕駛,與Waymo路線的老玩家們,一道開啟Robotaxi的衛(wèi)冕之戰(zhàn)。
特斯拉宣布要在今年6月底正式在北美推出自己的Robotaxi,第一批可能就10多臺(tái),但這次應(yīng)該真的“狼來了”,不然老馬在自動(dòng)駕駛上的信用賬戶就真的要破產(chǎn)了。而Momenta也宣布將在25年底推出行業(yè)內(nèi)Robotaxi主駕無人的運(yùn)營(yíng)方案,并且聯(lián)手Uber在2016年進(jìn)入歐洲市場(chǎng)。
值得一提,特斯拉的Robotaxi還不是之前大張旗鼓發(fā)布的去掉駕駛位的概念車,而是基于現(xiàn)有的量產(chǎn)車進(jìn)行Robotaxi運(yùn)營(yíng)。
同樣,Momenta特意強(qiáng)調(diào)自己的Robotaxi是基于前裝量產(chǎn)車型,一方面通過復(fù)用量產(chǎn)傳感器和計(jì)算單元來降低單車成本,另一方面通過“無圖技術(shù)”,還可實(shí)現(xiàn)在各國(guó)不同城市道路環(huán)境中的快速適配。

預(yù)判一下,特斯拉和Momenta會(huì)相互成為Robotaxi的勁敵嗎?
短時(shí)間,應(yīng)該不會(huì)。因?yàn)椴灰浽谖皇甑耐跽遅aymo已經(jīng)在北美經(jīng)營(yíng)已久,而國(guó)內(nèi)的蘿卜快跑、小馬、文遠(yuǎn)等L4車隊(duì)也已經(jīng)攻城略地。
這是新王挑戰(zhàn)舊王的一場(chǎng)戰(zhàn)爭(zhēng),也是沖擊Robotaxi規(guī)模化的衛(wèi)冕之戰(zhàn)。
新的冒險(xiǎn)故事再次開啟。當(dāng)年那個(gè)被Urmson所嘲笑的漸進(jìn)式路線的邏輯,如今已然失效——那些練習(xí)跳躍的人雖然沒有克服地球引力,但是他們進(jìn)化出了翅膀。
《航海王》里,所有海賊們都奔向了傳說中的大寶藏——Onepiece,那是自由與希望的應(yīng)許之地。那在自動(dòng)駕駛的偉大航路上,誰(shuí)能最后摘取Robotaxi這顆最后的王冠明珠呢?
這后半程的故事或許要由特斯拉和Momenta繼續(xù)書寫。
*本文圖片均來源于網(wǎng)絡(luò)
此內(nèi)容為【智能相對(duì)論】原創(chuàng),
僅代表個(gè)人觀點(diǎn),未經(jīng)授權(quán),任何人不得以任何方式使用,包括轉(zhuǎn)載、摘編、復(fù)制或建立鏡像。
部分圖片來自網(wǎng)絡(luò),且未核實(shí)版權(quán)歸屬,不作為商業(yè)用途,如有侵犯,請(qǐng)作者與我們聯(lián)系。
?AI產(chǎn)業(yè)新媒體;
?澎湃新聞科技榜單月度top5;
?文章長(zhǎng)期“霸占”鈦媒體熱門文章排行榜TOP10;
?著有《人工智能 十萬個(gè)為什么》
?【重點(diǎn)關(guān)注領(lǐng)域】智能家電(含白電、黑電、智能手機(jī)、無人機(jī)等AIoT設(shè)備)、智能駕駛、AI+醫(yī)療、機(jī)器人、物聯(lián)網(wǎng)、AI+金融、AI+教育、AR/VR、云計(jì)算、開發(fā)者以及背后的芯片、算法等。
1.TMT觀察網(wǎng)遵循行業(yè)規(guī)范,任何轉(zhuǎn)載的稿件都會(huì)明確標(biāo)注作者和來源;
2.TMT觀察網(wǎng)的原創(chuàng)文章,請(qǐng)轉(zhuǎn)載時(shí)務(wù)必注明文章作者和"來源:TMT觀察網(wǎng)",不尊重原創(chuàng)的行為TMT觀察網(wǎng)或?qū)⒆肪控?zé)任;
3.作者投稿可能會(huì)經(jīng)TMT觀察網(wǎng)編輯修改或補(bǔ)充。
